from Guangxi, China")





The scientists built a microscopic robot that can interact with light in a useful way.
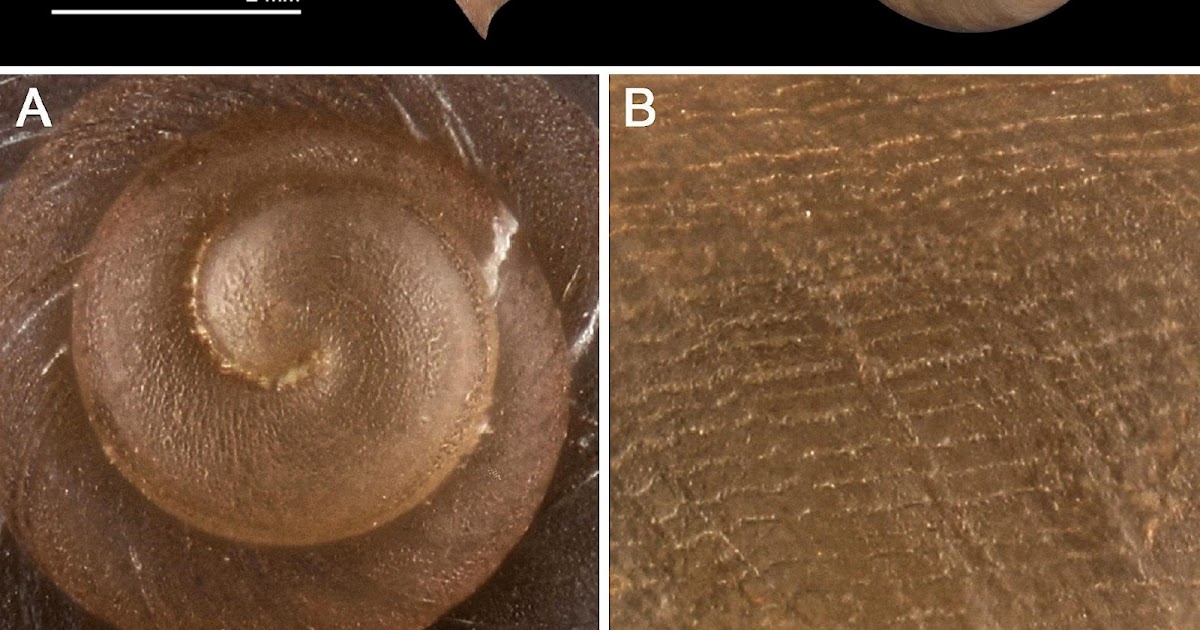
Introduction What do the wings of butterflies, peacock feathers and chameleon skin have in common? All these animals have beautiful intense colors. Unlike colors in a crayon, these colors do not come from pigment. Instead, microscopic patterns and textures are responsible for the colors we see! To understand why, we need to think about the waves. How would you describe the difference between a small undulation and the great waves that a surfer would travel? It may notice that waves are together, while ocean waves are very separate. The distance between wave ridges is wavelength. We see different light wavelengths as different colors. The waves change direction when they run to a narrow space or a sharp edge. This is called diffraction. How much the direction changes depends on the size of the space and the wavelength of the light. Small ridges and bumps in butterfly wings and peacock feathers cause diffraction and interference. This means that only a few specific wavelengths of light are reflected. The chameleons can go one step further. Within the skin of the chameleons there are billions of small crystals. The spaces between the crystals make the light diffract. When the chameleon tense or relaxes its skin, the space between the crystals also changes. This is what changes the color we see! Imagine if we could make a material that can change colors like a chameleon! We believe it would be super useful. We decided to make a new type of microscopic robot, or microbot, to try to do exactly that. Methods We design a new type of microscopic robot. It can be manufactured using the same technology used to make computer chips. The basic form of robots is simple. They are made of flat panels attached by ultra flexible hinges. In the upper part of the panels, we print a layer of special and super small magnets, arranged in a pattern (Fig. 1). These magnets allow us to control robots by changing the strength of a magnetic field. When we climb the strength of the magnetic field, the panels join, bending in the middle. That way, it can slide around, walking like an inch worm. Robots are just about 10 micrometers (millionth of subway) wide. That is small enough to fit on a red blood cell! The space between the panels is only 1 micrometer wide. When we get the robot panels, shrink the space. This gap is what allows us to control the diffraction of the light. Similar to the crystals on the skin of a chameleon, we can adjust the robot until the space is correct for the color of the light we want to see. Results we do some experiments to see how well we could control robots. We tried how fast the robot could move. One of the robots walked its length of his body 3 times in a second: a world record for robots of this size! They are also very maneuverable. To demonstrate, we guide the robot through a small maze (Fig. 2). We use a laser to measure the gap between the panels. The light that passes through a small diffractive space, making a pattern of points. We use a mathematical equation to calculate the size of the gap depending on the pattern of points. This helped us discover how precisely we could control the size of the holes. We made some different designs, organizing panels and magnets in stripes, crosses and triangles. We fix them in patterns in a small square chip. When we placed the chip in the light, we could see many bright colors! Discussion What can you do with a robot that is as small as a cell? Scientists have many ideas. Micro-machines could transport medications to specific places of the body, make new tools for doctors or explore the microscopic environment. Our study explored a new idea: using microscopic robots to manipulate light. We believe that these little robots have a lot of potential. They can make more than change the color of the light and move. They can direct and focus light to make super sensitive measurements. We believe that these microbots could improve the technology that doctors use, such as microscopes and endoscopes. It is very difficult to make a machine so small, and even more difficult to find a way to make it move useful. Robots are too small to have an engine or battery. Robots control requires an elegant 3D electromagnet. To use robots outside a laboratory, we would like to create a simpler controller. Conclusion Inventors often seek inspiration in nature. All living beings have special skills that help them survive. We can learn a lot by paying more attention to the natural world that surrounds us. What helps a tree be flexible and strong? How do the microscopic characteristics of the skin, the scales or feathers of the animals change as seen and the animal moves? These types of questions can lead to new ideas and inventions. What will you discover?
#microscopic #robot